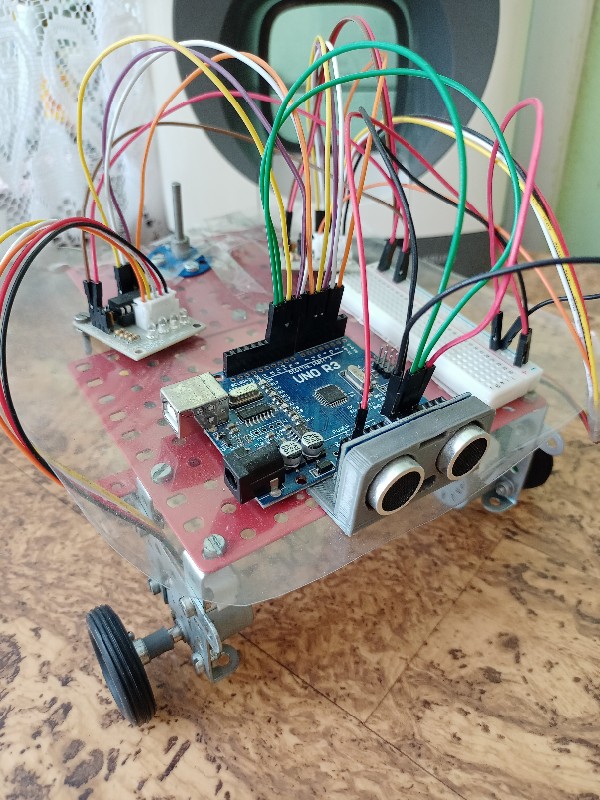
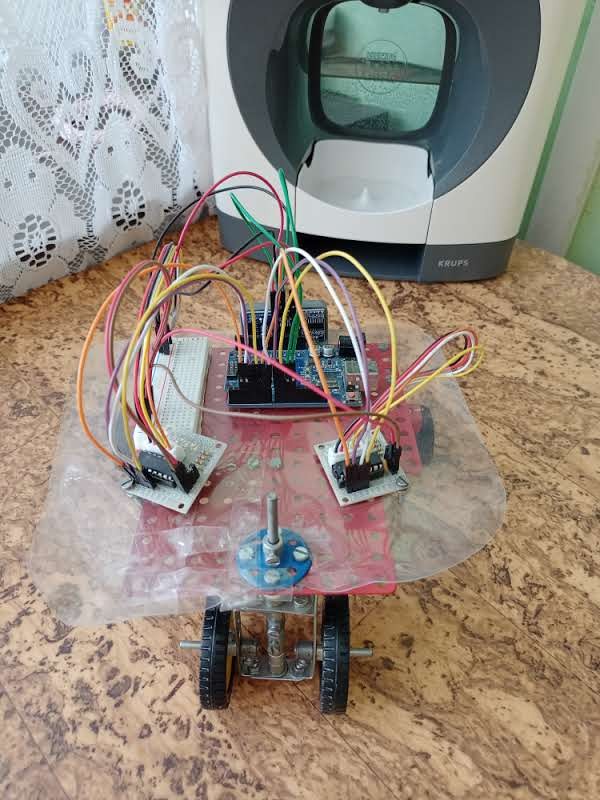
Cílem projektu Smart Car, je Arduino platforma a dva krokové motory, které se řídí podle ultrazvukového senzoru.Pokud senzor detekuje překážku ve stanovené vzdálenosti, Arduino provede odpovídající akci, například zastaví vozítko nebo změní jeho směr, aby se vyhnulo kolizi. Tento projekt umožní studentům a nadšencům získat praktické zkušenosti s programováním, řízením motorů a prací se senzory v reálných podmínkách, čímž přispěje k rozvoji jejich znalostí v oblasti robotiky a automatizace.
Kód:
#include <AccelStepper.h>
// Definice pinů pro krokové motory
#define motor1Pin1 2
#define motor1Pin2 3
#define motor1Pin3 4
#define motor1Pin4 5
#define motor2Pin1 6
#define motor2Pin2 7
#define motor2Pin3 8
#define motor2Pin4 9
// Definice pinů pro ultrazvukový senzor
#define trigPin 10
#define echoPin 11
// Rychlost a akcelerace motorů
#define MOTOR_SPEED 900 // Rychlost motorů (v krocích za sekundu)
#define MOTOR_ACCEL 200 // Akcelerace motorů
// Definice vzdálenosti překážky (v cm)
#define OBSTACLE_DISTANCE 4
// Inicializace motorů
AccelStepper motor1(AccelStepper::FULL4WIRE, motor1Pin1, motor1Pin2, motor1Pin3, motor1Pin4);
AccelStepper motor2(AccelStepper::FULL4WIRE, motor2Pin1, motor2Pin2, motor2Pin3, motor2Pin4);
// Funkce pro měření vzdálenosti pomocí ultrazvukového senzoru
long measureDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH);
long distance = duration * 0.034 / 2; // Převod na centimetry
return distance;
}
// Nastavení pro krokové motory
void setupMotors() {
motor1.setMaxSpeed(MOTOR_SPEED);
motor1.setAcceleration(MOTOR_ACCEL);
motor1.moveTo(-10000); // Pohyb dopředu
motor2.setMaxSpeed(MOTOR_SPEED);
motor2.setAcceleration(MOTOR_ACCEL);
motor2.moveTo(10000); // Pohyb dopředu
}
void setup() {
// Inicializace motorů a senzorů
setupMotors();
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop() {
// Měření vzdálenosti
long distance = measureDistance();
Serial.println(distance);
// Pokud je před překážkou, popojeď dozadu a otoč se
if (distance < OBSTACLE_DISTANCE) {
// Zastavení motorů
motor1.stop();
motor2.stop();
// Krátký pohyb dozadu
motor1.move(-600);
motor2.move(-600);
while (motor1.distanceToGo() != 0 || motor2.distanceToGo() != 0) {
motor1.run();
motor2.run();
}
// Otočení o X stupňů (přibližně, podle krokového motoru uprav kroky)
motor1.move(50); // Jeden motor jede dopředu
motor2.move(-50); // Druhý motor jede dozadu
while (motor1.distanceToGo() != 0 || motor2.distanceToGo() != 0) {
motor1.run();
motor2.run();
}
// Po otočení se zase rozjedeme dopředu
motor1.moveTo(10000);
motor2.moveTo(10000);
}
// Normální jízda dopředu
motor1.run();
motor2.run();
}